×
×
×
Products
Corporate

Autonomous vehicles need continuous situational awareness: they need sophisticated sensors (RADAR, LIDAR, high-resolution cameras, etc.) to constantly capture environmental information that the vehicle need to perform autonomous tasks. This requires a set of High Performance Embedded Computing (HPEC) systems that are capable of processing huge amounts of data, exchange these data with sensors and apply Edge AI (Artificial Intelligence) and deep learning algorithms to train the vehicle in real time.
Eurotech provides HPEC systems that can be combined to deliver unmatched performance and capacity in Automotive and Rugged applications. These systems provide storage, computing, networking and Edge AI and deep learning capabilities to win the challenges of Level 5 Autonomous Driving (vehicle are fully autonomous, with no need of intervention from the driver)
Eurotech HPEC systems are certified for Automotive applications and feature liquid cooling to enable a seamless integration in the user application
Following are 3 possible architectures featuring Eurotech HPEC systems to enable Autonomous Driving.
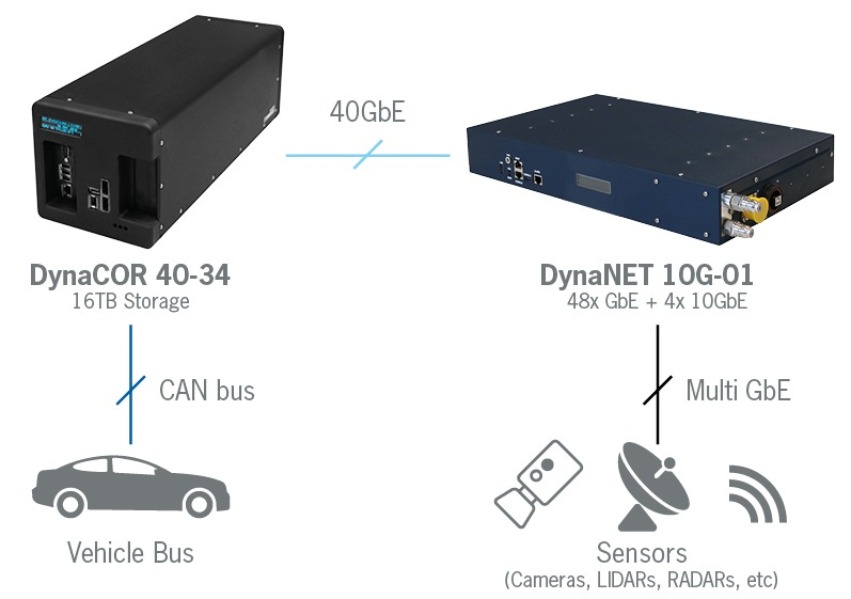
This use case is an example of a streamlined high-performance datalogging application, where the DynaCOR 40-34 receives the aggregated data stream coming from a number of vehicle sensors through the DynaNET 10G-01. This architecture is well balanced, with a 40GbE backbone and up to 48x 1GbE data sources.
This setup provides tremendous value to customers that need to collect vehicle and environmental data sets under actual driving conditions, making use of existing, commercial vehicles with minimal modifications. The extreme compactness of the system, and its automotive certifications allow installing the DynaCOR 40-34 and DynaNET 10G-01 using only a fraction of the volume of the trunk of a typical small-size car.
This use case adds scalable computational capabilities to the logging capacity of the stand-alone architecture illustrated in the previous section and introduces two new building blocks that enable in-vehicle Edge AI. The DynaCOR 50-35 is a rugged HPEC server with unprecedented computing capabilities that supports AI and deep learning algorithms at the edge for autonomous driving. The DynaNET 100G-01 is a high performance Ethernet switch with 100GbE ports for huge amounts of bidirectional data transfer.
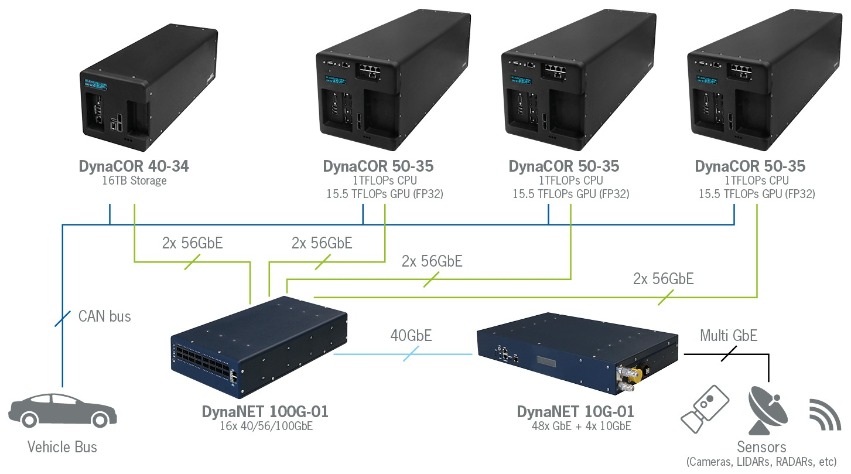
In the example shown here, the sensor data streams are aggregated by a DynaNET 10G-01 and then fed into the backbone DynaNET 100G-01. In this arrangement all DynaCORs make use of 2x56GbE links, for a total 112Gb/s bandwidth per device, which can be allocated dynamically. It is quite reasonable to assume that the continuous, real-time sensor data stream (at up to 40Gb/s) will be directed to the first DynaCOR interface, leaving the second one available for calculation tasks and messages.
A remarkable feature of both DynaNET 100G-01 and DynaNET 10G-01 is Layer 3 networking, which enables very fine traffic management. This is crucial to minimize latency and to ensure that the data streams are directed to the correct device, avoiding data starvation and similar other network issues that would degrade deterministic operating conditions of the architecture as a whole.
Since DynaNET 100G-01 provides 16 ports, each capable of 40/56/100Gb/s, and both the DynaCOR 40-34 and DynaCOR 50-35 feature dual 40/56Gb/s interfaces, it is possible to mix and match up to 15 DynaCORs using 40/56Gb/s links, or up to 7 DynaCORs with 80/112Gb/s links; one or two 40GbE links could be used to reach the sensor network connected to one or two DynaNET 10G-01.
By mixing and matching the building blocks, it is possible to reach extreme configurations, such as: up to 256TB of NVMe storage capacity (using 16 storage devices), or up to 16TFLOPs (CPU) + 248TFLOPs (GPU, FP32) computational performance, and anything in between. This enables Edge AI and deep learning for tremendous data processing on board.
It is worth noting that each DynaCOR features 2x GbE interfaces, which allow direct sensor connection even in these extreme cases; moreover, the DynaCOR 50-35 can be configured with NVME storage, providing extra flexibility to the customer.
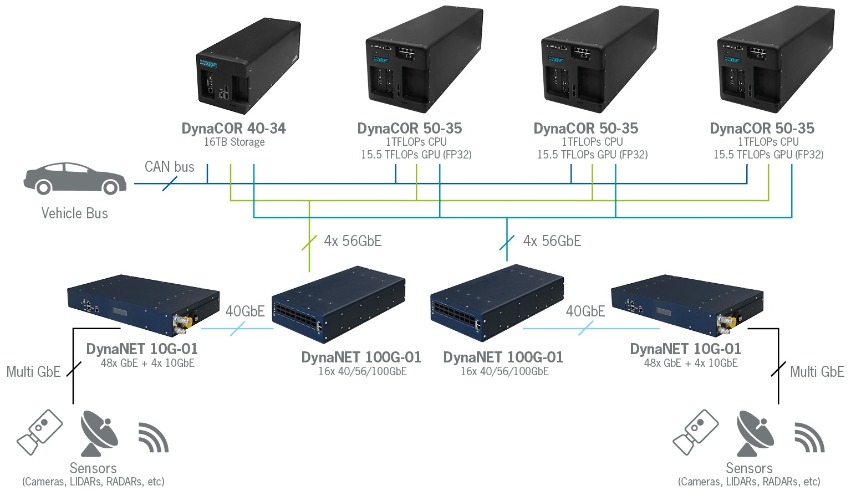
In the last example, we are showing how to implement a redundant architecture by adding two more switches. While this is a simplistic approach that does not completely reflect how a true redundant architecture is implemented in real cases, it still demonstrates how it is possible to create a very sophisticated computation and storage infrastructure in a normal vehicle, while keeping well within the physical constrains imposed by space, operating conditions and total allowable power.